 22/06/15
22/06/15Odak dışı ışığı yakalamak, birçok görüntüleme uygulamasında net, yüksek kontrastlı görüntüler elde etmek için zorlu bir süreçtir. Dijital Taramalı Işık Levhası Mikroskobu (DSLM), aydınlatmayı modern CMOS kameraların "dönen deklanşörü" ile senkronize ederek odak dışı ışık yakalamasını azaltmanın güçlü bir yolunu sunar. Ancak bu hassas senkronizasyon, kameranın dönen deklanşörünün çalışması üzerinde tam kontrol gerektirir; bu özellik, Dönen Deklanşör Kontrol Modu'na sahip Tucsen kameralar tarafından sunulur.
Rolling Shutter Nedir?
Deklanşör, kameranın ışığa maruz kalmasını başlatan ve durduran parçadır. Eskiden bilimsel kameralar, görüntüyü açığa çıkarmak için açılıp pozlamayı sonlandırmak için kapanan mekanik deklanşörler kullanırdı. Mekanik deklanşörler yavaştı ve uzun süreli kullanımda güvenilirlik sorunlarına yol açıyordu. Günümüzde ise bilimsel kameralar, önemli ölçüde daha hızlı, daha basit ve daha çok yönlü olan elektronik deklanşörler kullanıyor.
Rolling shutter kameralar, görüntü yakalamaya sensörün üst kısmından başlar ve satır satır sensörün alt kısmına doğru 'yuvarlanır'. Bu yakalama üç işlemden oluşur: sinyal sıfırlama, ışık pozlama ve okuma.
Her satırın pozlaması, her pikselin elde edilen sinyalinin sıfırlanmasıyla başlatılır. En üst satır için belirlenen pozlama süresi dolduktan sonra, yakalama işleminin sonunu belirten okuma aynı şekilde aşağı doğru yuvarlanır. Bu, kameranın üstünden altına doğru uzanan ve yüksekliği pozlama süresinin uzunluğuna göre belirlenen aktif piksellerden oluşan bir alan bırakır. Kamera tam hızda çalışırken, satır başına gecikme, kameranın hızına bağlı olarak genellikle piksel satırı başına 5 ila 25 mikrosaniye arasındadır.
Aydınlatma taraması ile kameranın kepenk sisteminin senkronizasyonunu gerektiren optik tekniklerden yararlanmak için, genellikle bu gecikme çok kısadır; bu da kepenk sisteminin diğer donanımların yetişemeyeceği kadar hızlı çalıştığı anlamına gelir. Kepenk Kontrol Modu tam da bu noktada devreye girer.
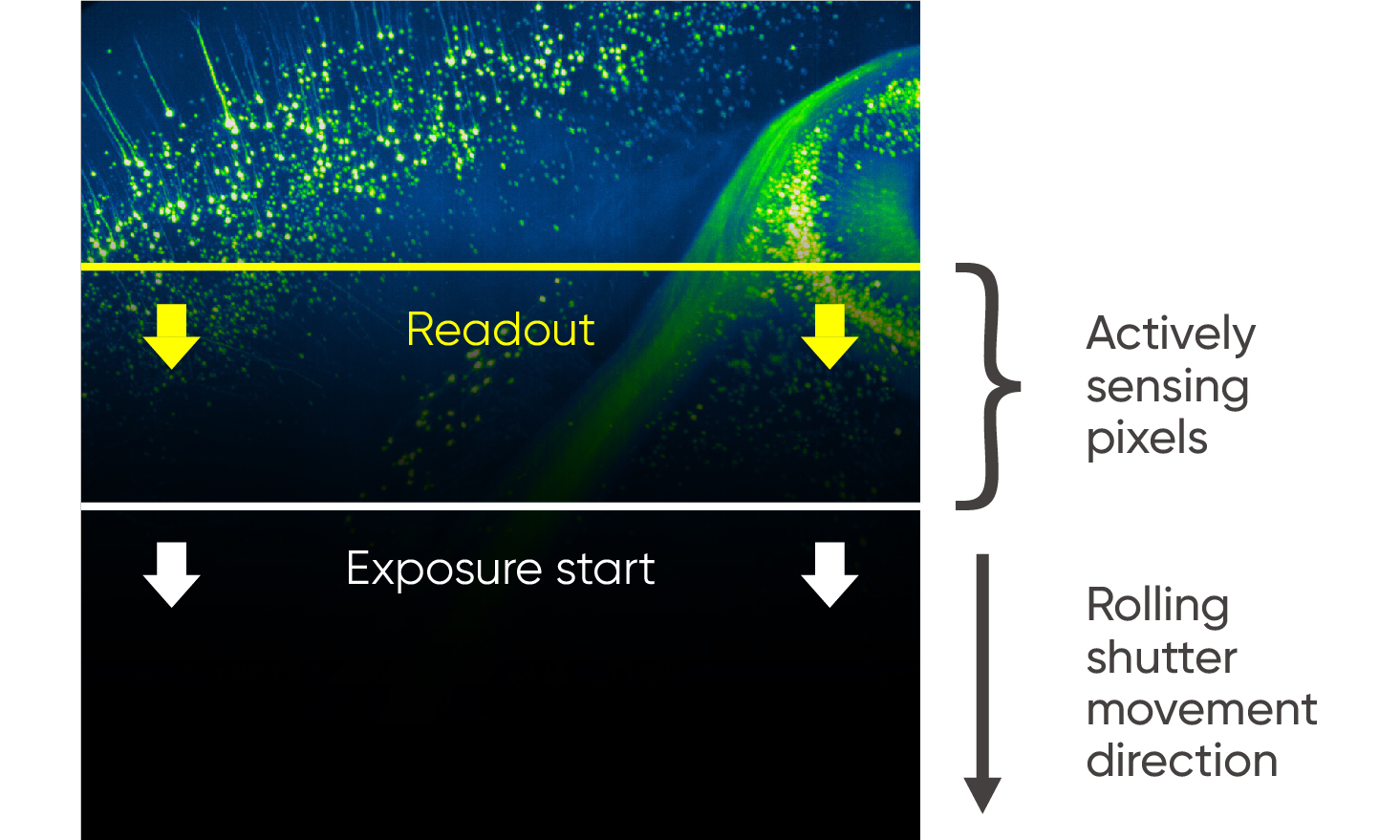
Şekil 1: Kepenk çalışmasının şematik diyagramı
Panjur Kontrol Modu Nasıl Çalışır?
Tucsen kameralarındaki yerleşik zeka sayesinde, kameranın yuvarlanan deklanşörünün çalışması, harici donanımla senkronize olacak şekilde hassas bir şekilde ayarlanabilir. Her satırın sıfırlanması ve okunması arasına küçük bir ek gecikme eklenerek, aktif piksel alanının sensör üzerinde aşağı doğru hareket etmesi için gereken süre kontrol edilebilir ve bu senkronizasyon sağlanabilir.
Ayrıca, taranan aktif alanın "yarık yüksekliği" ince ayarlanabilir. Daha uzun pozlama süreleri veya daha kısa çizgi gecikmeleri, daha büyük yarık yüksekliğine yol açar. DSLM söz konusu olduğunda, bu, yalnızca örneğin aydınlatılan alanını eşleştirmek için kullanılabilir ve pikselleri etkili sinyal yakalama için mümkün olan en uzun süre boyunca pozlamak ile odak dışı ışığı en aza indirmek arasında bir denge sağlar.
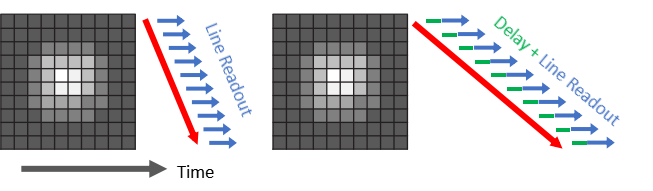
Figür2: Sol: Tam kamera hızında yuvarlanan deklanşörün çalışma şeması. Sağ: Yuvarlanan Deklanşör Kontrol Modu'nun her satır arasına ek gecikme ekleyerek diğer donanımlarla senkronizasyonu sağlayan yuvarlanan deklanşör hızını gösteren şema.
Bu isteğe bağlı gecikmeyle, yuvarlanan deklanşörün çalışmasını belirleyen üç önemli değişken daha anlaşılıyor: 'aktif' piksel alanının yüksekliği ve sensörden ne kadar hızlı geçtiği.
Satır Zamanı: Bu, sensörün bir satırı okuyup bir sonrakine geçmesi için gereken varsayılan süredir. Kamera sensörünün yerel 'hızını' belirler ve kamera yazılımında belirtilebilir veya belirli bir ilgi alanı (ROI) ve kamera modu için şu şekilde yaklaşık olarak hesaplanabilir:

'Maksimum Kamera Kare Hızı', pozlama süresi uzunluğu veya harici tetikleme oranı ile sınırlı olmayan kare hızını ifade eder.
Maruziyet süresi:Bu, her piksel satırının ne kadar süreyle etkin olacağını belirler, böylece belirli bir satır süresi ve gecikme süresi için etkin alanın yüksekliği belirlenir.
Hat Zaman Gecikmesi:Rolling Shutter Kontrol Modu tarafından eklenen ek gecikme miktarı. Rolling Shutter Kontrol Modu, gecikmenin eklenmesine olanak tanırsatır zamanının tam sayı katlarındaÖrneğin, bir kamera için hat süresi 10 mikrosaniye ise, 1, 2, 3'lük hat başına ek gecikme…10 mikrosaniyenin katlarının sayısını belirterek 8.928'e kadar eklenebilir.
Ayrıca, kullanılan ilgi alanının (ROI) yüksekliği de önemlidir, çünkü bu, aktif alanın sıfırlamadan önce aşağı doğru tarama yapması gereken satır sayısını belirleyecektir.
Panjur Kontrol Modu Senkronizasyon Modları
Kepenk Kontrol Modu için, hangi değişkenin kontrol edilmesinin daha önemli olduğuna bağlı olarak iki çalışma modu vardır.
In Hat Zaman Gecikmesi modu, gecikme süresini yukarıda belirtildiği gibi ayarlayabilirsiniz. Yazılım daha sonra, belirlediğiniz pozlama süresi için, ortaya çıkan Yarık Yüksekliğinin (rolling shutter'daki aktif piksellerin yüksekliği) ne olacağını gösterebilir.
In Aktif Piksel / Yarık Yüksekliğimodunda, yuvarlanan deklanşör hareket ederken aktif olmasını istediğiniz sensör satır sayısını ayarlayabilirsiniz. Belirlediğiniz pozlama süresi, bu yarık yüksekliğini otomatik olarak sağlamak için gereken Satır Zaman Gecikmesi'nin hesaplanmasında kullanılacaktır.
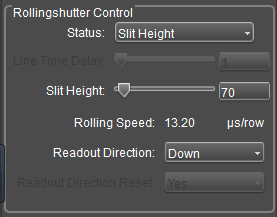
Yazılımda Panjur Kontrol Modunu Ayarlama
Çalışma Modu (Durum) Kontrolleri
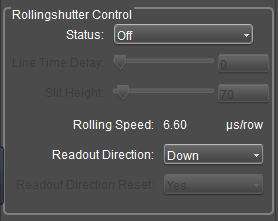
Şekil 3: Tucsen Mosaic yazılımından Panjur Kontrol Modunu kontrol etmek için örnek arayüz. Tüm seçenekler Micro-Manager ve SDK üzerinden kullanılabilir.
Üç Durum (çalışma modu) mevcuttur:Off, Hat Zaman Gecikmesi, Yarık Yüksekliği.
• AyarlandığındaKapalı, sensör herhangi bir ek gecikme olmadan normal şekilde davranır.
• AyarlandığındaHat Zaman Gecikmesimodunda, yukarıda açıklandığı gibi, Satır Zaman Gecikmesini satır zamanı birimleriyle belirtebilirsiniz.
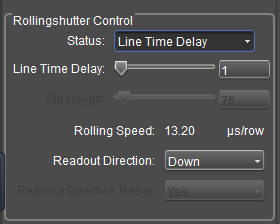
Şekil 4: Hat Zaman Gecikmesi yazılım seçenekleri. ÖrnekTucsen Mosaic yazılımından arayüz. Tüm seçenekler Micro-Manager ve SDK üzerinden kullanılabilir.
Yapılandırılabilir gecikmeye eklenebilecek satır süresi döngüsü sayısı kameradan kameraya değişir. Gecikme eklendikten sonra kameranın yeni satır süresi şu şekilde olur:
Satır Aralığı Süresi = Satır süresi(sensör)+(Satır süresi(sensör)× Hat Zaman Gecikmesi)
Parametre değeriYuvarlanma HızıeşittirSatır Aralığı Süresi.
Görüntünün toplam okuma süresi şu şekildedir:
RbaşZaman aşımı(görüntü)= Satır Aralığı Süresi×Nsatırlar.
Nsatırlarİlgi alanındaki toplam görüntüleme pikseli satır sayısıdır. Bu modda görüntüleme yaparken kare hızı, görüntülenecek satır sayısına ve satır döngü süresine bağlıdır:
Kare hızı = 1/(Okuma Süresi(görüntü)+ Pozlama Süresi)
•AyarlandığındaYarık Yüksekliği mode, ayarlayabilirsiniztaranan etkin alanın boyutu, t ile verilir"Sıfırlama" sinyali ile "okuma" sinyali arasındaki piksel satırlarının sayısı.Yarık Yüksekliği aralığı piksel cinsinden 1~2048'dir. Bunu fiziksel bir boyuta dönüştürmek için, bu değeri kamera teknik özellik sayfasındaki piksel boyutuyla çarpın.
Şekil 5: Yarık Yüksekliği modu kontrol seçenekleri. ÖrnekTucsen Mosaic yazılımından arayüz. Tüm seçenekler Micro-Manager ve SDK üzerinden kullanılabilir.
Yazılım, gerekli Hat Zaman Gecikmesi ve Hat Aralığı Süresini otomatik olarak hesaplayacaktır, formül aşağıdaki gibidir:
Satır Zaman Gecikmesi = Pozlama Süresi(Çizgiler)/ Yarık Yüksekliği(Çizgiler)
Yüksek Hız Modu'ndayken (kameranın kazanç modu), Yarık Yüksekliği aralığı yalnızca çift sayıya ayarlanabilir, çünkü bu modda çizgiler ikişer ikişer okunur. Yüksek Hız Modu'ndaki parametreler aşağıdaki gibi hesaplanır.
Satır Zaman Gecikmesi = Pozlama Süresi(Çizgiler)/ ½ Yarık Yüksekliği(Çizgiler)
Yarık Yüksekliği = (Maruziyet süresi(Çizgiler)÷ Hat Zaman Gecikmesi)×2
Tarama Yönü Kontrolleri
Kepenk yönü için üç seçenek bulunmaktadır:
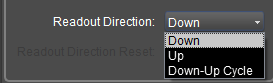
Dsahip olmak:Aşağı tarama yönü, sCMOS kameralar için varsayılan tarama yönüdür. Yuvarlanan deklanşör, Sensörün üst kısmındaki ilk sıradan başlar ve alttaki son sıraya kadar aşağı doğru tarama yapar. Sonraki her kare yakalama, üstteki ilk sıradan başlar.
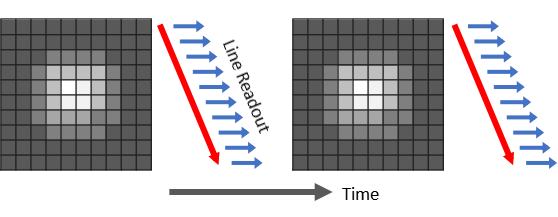
Şekil 6: Aşağı Doğru Tarama Modu Şeması
Up:Yukarı doğru tarama modunda, yuvarlanan deklanşör alt sıradan başlar ve ilk sıranın en üst sırasına kadar tarama yapar. Sonraki her kare yakalama işlemi alt sıradan başlar. Kameradaki veri yakalama sırası artık tersine dönmüş olsa da, yazılıma iletilen görüntü hala orijinal yönünü gösterecektir, yani görüntü aşağı doğru tarama moduna göre dikey olarak çevrilmeyecektir.
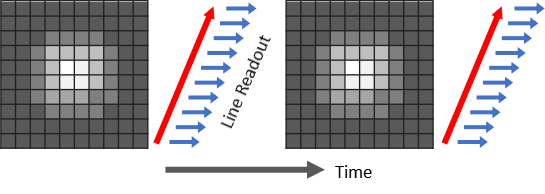
Şekil 7: Yukarı Doğru Tarama Modu Şeması
Aşağı-Yukarı Döngüsü:Yukarı ve aşağı dönüşümlü olarak tarama yaparken, yuvarlanan deklanşör en üstteki ilk satırdan başlar ve en alttaki son satıra kadar iner. Bir sonraki karede, yuvarlanan deklanşör en alt satırdan başlar ve en üst satıra kadar tarama yapar ve bu şekilde devam eder. Bu modda elde edilen görüntünün yönü, aşağı doğru tarama yönüyle aynıdır.

Şekil 8: Aşağı-Yukarı Döngü Tarama Modu Şeması
• Readout Yön Sıfırlama
Bu fonksiyon sadece Aşağı-Yukarı Döngüsü modunda kullanılabilir.
Bu parametrenin varsayılan ayarı "Evet"tir; bu, her yeni edinim dizisinin ilk karesinin en üst satırdan başlayıp aşağı doğru taranmasını sağlar.
Bu parametre "Hayır" olarak ayarlandığında, her yeni çekimin ilk karesi, önceki dizideki son karenin konumundan başlar. Son kare alt satırda bitiyorsa, sonraki çekimlerin ilk karesi alt satırdan başlar ve yukarı doğru yayılır.











